Managing service-level agreement of robotic assignments
A service-level agreement (SLA) specifies the time by which robots must complete all instances of a given assignment type. By defining an SLA, you can measure the performance and service of your robots, based on your business objectives.
Additionally, an SLA can help you to decide whether to move more robots to work group in which you observe an increased number of SLA breaches.Default SLA
To ensure timely assignment completion, if you do not configure an SLA in the Assign to robot queue smart shape, then Pega Robot Manager applies the default pyDefaultSLAForRoboticAssignment SLA rule to an assignment type. The default SLA value is three hours.
To better measure and manage the workload for a given assignment type (work queue), you can override the default SLA value in Robot Manager.
Configuring service-level agreement for robotic assignments
To help you to meet your business objectives, set measurable performance standards for the completion of robotic assignments.
Meaningful SLAs influence how Pega Robot Manager determines whether a work group is reaching its capacity limits, and therefore needs more robots to work on assignments that are approaching an SLA deadline.- In the navigation pane of Pega Robot Manager, click .
- Select the work group that contains the assignment type whose SLA you want to update.
- In the Assignment types section, select an assignment type.
- In the Service level agreement (SLA) widget for the
selected assignment type, perform one of the following actions:
- To customize the default SLA value for this assignment type, click Override.
- If you already customized the SLA value for this assignment type, click the Edit icon.
- To restore the default SLA value, click the Delete icon.
- In the Edit service-level agreement (SLA) dialog box,
configure the service level agreement:
- Set the deadline for completing the assignment type, in days, hours, and minutes.
- Confirm your settings by clicking Submit.
See the following example:Customizing the default SLA value for an assignment type 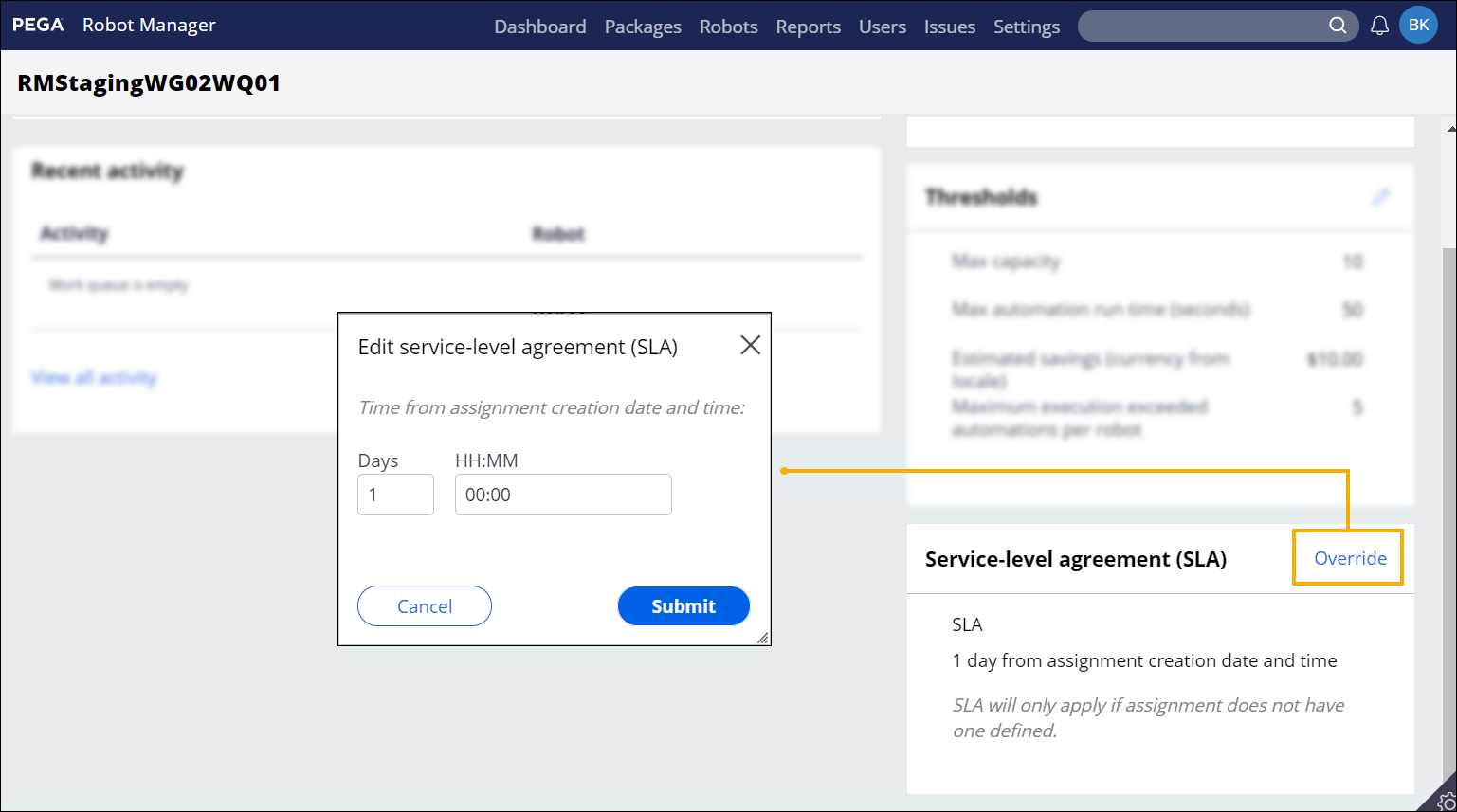
Previous topic Designating work groups for auto-balancing of robot workload Next topic Estimating the workload across work groups